
TF5000 | TwinCAT 3 NC PTP 10 Axes

TF5000 | TwinCAT 3 NC PTP 10 Axes

TwinCAT 3 NC PTP 10 Axes 通过软件实现了点到点运动的运动控制功能。通过轴对象描述轴并且提供循环调用接口,如用于 PLC中。然后将轴对象关联至相应的物理轴。利用这种方式,轴对象就能够与多数现场总线接口的轴相连接,而轴对象总是提供一个相同的配置界面。支持在不同控制器中以不同配置(位置或速度接口)对轴进行控制。轴在 TwinCAT 开发环境中配置。
功能特点
- 最多 10 个轴,最多可扩展至 255 个轴
- 支持同步电机伺服驱动器和液压伺服驱动器、变频驱动器、步进电机驱动器、直流驱动器、开关型驱动器(快/慢轴)、虚拟轴和编码器轴
- 支持 EtherCAT (CoE、SoE) 等各种现场总线接口
- 标准轴功能,如启动/停止/复位/参考点、速度超调、主/从耦合、电子齿轮、动态位置补偿
- 编程通过符合 PLCopen 标准的 IEC 61131-3 功能块实现
- 方便的轴调试选项
- 在线监视所有的轴状态变量,如实际/设定值、释放、控制值
- 在线轴调整
- 配置所有轴参数,如测量系统、驱动器参数和位置控制器
- 可配置的控制器结构体:P 控制、PID 控制、带速度前馈的 PID、带速度和加速度前馈的 PID
- 联机主轴/从轴和从轴/主轴转换
- 飞锯
- 电子凸轮(支持 TwinCAT 3 CAM Design Editor[可选])
- 通过 PLC 的外部设定点灵活生成定制化配置文件
- 多主轴耦合
- PLC 库 OMAC PackML
产品状态:
正常供应
产品信息
| 技术数据 | TF5000 |
|---|---|
| 要求 | TC1200 |
| 包含在 | TC1250, TC1260, TC1270, TC1275 |
| 操作系统 | Windows 10, Windows 11, Windows CE, TwinCAT/BSD, Beckhoff RT Linux® |
| CPU 结构 | x86, x64, Arm® |
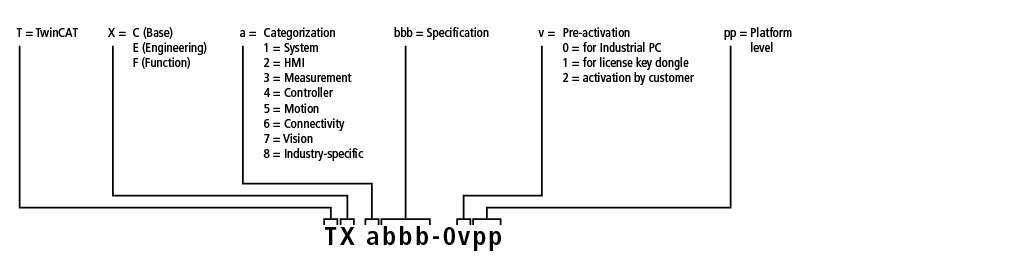
| 订购信息 | |
|---|---|
| TF5000-0v20 | TwinCAT 3 NC PTP 10 Axes,平台等级 20(经济型),仅可在倍福 RT Linux® 上运行 |
| TF5000-0v30 | TwinCAT 3 NC PTP 10 Axes,平台等级 30(经济增强型) |
| TF5000-0v40 | TwinCAT 3 NC PTP 10 Axes,平台等级 40(普通型) |
| TF5000-0v50 | TwinCAT 3 NC PTP 10 Axes,平台等级 50(普通增强型) |
| TF5000-0v60 | TwinCAT 3 NC PTP 10 Axes,平台等级 60(中等性能型) |
| TF5000-0v70 | TwinCAT 3 NC PTP 10 Axes,平台等级 70(高性能型) |
| TF5000-0v80 | TwinCAT 3 NC PTP 10 Axes,平台等级 80(极高性能型) |
| TF5000-0v81 | TwinCAT 3 NC PTP 10 Axes,平台等级 81(极高性能型) |
| TF5000-0v82 | TwinCAT 3 NC PTP 10 Axes,平台等级 82(极高性能型) |
| TF5000-0v83 | TwinCAT 3 NC PTP 10 Axes,平台等级 83(极高性能型) |
| TF5000-0v84 | TwinCAT 3 NC PTP 10 Axes,平台等级 84(极高性能型) |
| TF5000-0v90 | TwinCAT 3 NC PTP 10 Axes,平台等级 90(其它,1…4 个处理器核) |
| TF5000-0v91 | TwinCAT 3 NC PTP 10 Axes,平台等级 91(其它,5…8 个处理器核) |
| TF5000-0v92 | TwinCAT 3 NC PTP 10 Axes,平台等级 92(其它,9…16 个处理器核) |
| TF5000-0v93 | TwinCAT 3 NC PTP 10 Axes,平台等级 93(其它,17…32 个处理器核) |
| TF5000-0v94 | TwinCAT 3 NC PTP 10 Axes,平台等级 94(其它,33…64 个处理器核) |
对于平台等级 90-94,我们推荐使用 TwinCAT 3 授权加密狗。
正在加载页面内容…请稍候
正在加载页面内容…请稍候
正在加载页面内容…请稍候
正在加载页面内容…请稍候
正在加载页面内容…请稍候
© Beckhoff Automation 2025 - 使用条款