Oceaneering Mobile Robotics 公司的 UniMoverTM O 600 系统配备节省空间的高性能自动化技术,非常适合用于工业和医疗设备
内部物流、航空航天、娱乐设备、海上石油和天然气、可再生能源和科研有何共同之处?
首先,这些行业的应用都可以从自主机器人技术中获益。其次,OMR为这些行业开创了创新的自动化解决方案。
据 OMR 技术经理 Gareth Jones 博士介绍,Oceaneering Mobile Robotics(OMR)将公司在移动机器人领域积累的丰富专业知识应用于物料搬运。集团在部署制造业、医院、配送和汽车行业所需的系统方面拥有丰富的经验,并为众多全球最知名的品牌提供服务。目前 OMR 总共有 1700 多个移动机器人部署在北美、欧洲、澳大利亚和亚洲,行驶里程累计超过 3000 万英里。OMR 专注于打造产品线标准化,以提高产品在各种新应用中的采用率,一直保持高增长速度。

“我们与其他很多移动机器人供应商一样,最初也专注于提供定制化解决方案。但所有行业的需求都呈现增长态势,我们希望增加移动机器人的使用。”Jones 解释说道。“现在,我们不再每年只生产几十辆定制化车辆,而是专注于生产数百辆标准化产品,并规划了强大的产品路线图,比如最近推出的 UniMover TM O 600。”
通往成功的道路
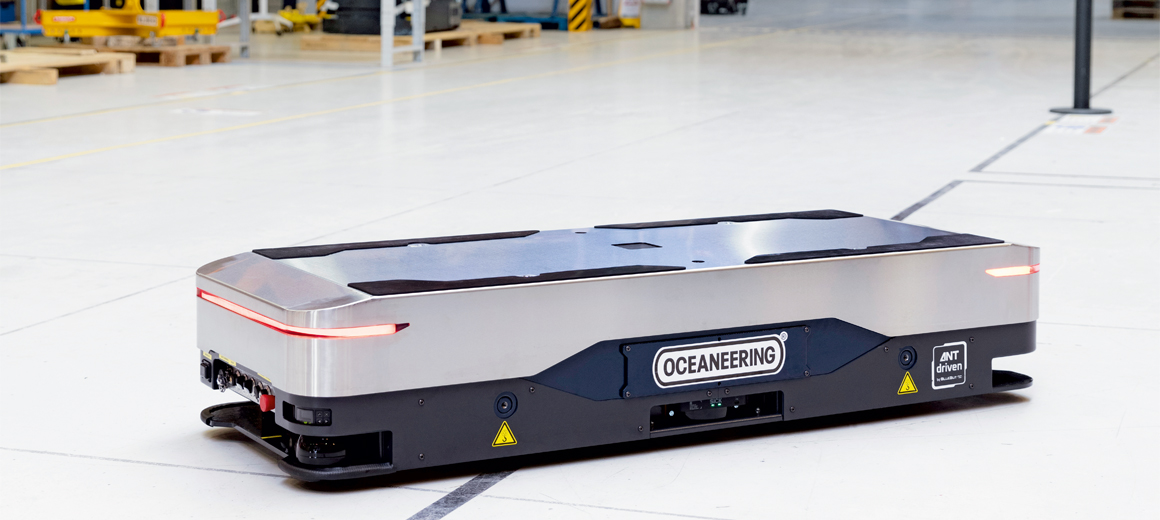
UniMoverTM O 600 是一种举升型移动机器人,适用于空间极为狭小的轻工业和医疗保健应用。它的速度可以达到每秒 1.8 米,最大有效载荷 600 公斤(1322 磅)。
UniMoverTM O 600 是一款典型的高效、经济的输送解决方案,适用于工业和医院应用中的物品或物料取放,如原材料、食物或洗好的衣物。这款全向移动智能小车配备带安全激光雷达的自然导航,可以识别并安全通过繁忙的非结构化环境。UniMoverTM O 600 可以在自主移动机器人(AMR)模式下运行,在这种模式下,既能限制机器人速度,又能让机器人主动避让障碍物;UniMoverTM O 600 也可以在 AGV 模式下运行,这种模式能够提升机器人移动速度,但在检测到有障碍物时机器人会停下来,而不是绕过障碍物继续向前移动。
OMR 工程师除了要确保机器人的功能和可靠性之外,还需要将所有控制硬件装到尽可能小的空间内,保持车辆结构紧凑,尺寸仅为 1670 x 600 x 335 毫米(65.8 x 23.6 x 13.2 英寸)。他们还需要开发支持批量生产标准解决方案的制造工艺。据 Jones 介绍,他们过去会使用 Linux 编程车辆和生产设备,技术人员通过 Linux 命令行测试产品。尽管这样效率比较低,但团队不能完全放弃多年开发的成果。

OMR 在 2021 年开始根据功能需求对自动化供应商进行评估,通过他们的国际团队在全球范围内寻找合作伙伴。在经过六个月的评估后,倍福凭借其在功能性和可用性方面的出色表现,被 OMR 选中。
替代操作系统提升了机器人系统的灵活性
每辆车都配备倍福的 C6017 超紧凑型工业 PC,实现控制逻辑以及其它功能。虽然 Windows 长期以来一直是倍福设备控制器的默认操作系统,但 UniMoverTM 上使用的 C6017 采用的则是 TwinCAT/BSD 操作系统(OS)。TwinCAT/BSD 是一款现代的类 UNIX 操作系统,在性能和安全性方面表现不俗。严格来说,它在功能上类似于现代 PLC,使用实时操作系统(RTOS),而不是专用固件。
倍福全球物料搬运和内部物流经理 Doug Schuchart 表示,TwinCAT/BSD 可以帮助 OMR 以及其它很多物料搬运专家改变生态环境,重构行业格局。“与传统硬 PLC 中的‘黑盒子’方案不同,TwinCAT/BSD 是倍福数十年来控制技术发展的成果。”Schuchart 说道,“这一性能强大的操作系统还保持了开放性,允许设备运行 Linux 发行版本等第三方软件,并且可以在我们新的 Hypervisor 中运行虚拟机。将第三方软件和 PLC 整合在同一硬件中可以为很多应用带来优势,无论是在本地操作系统中,还是在虚拟机中的另一个操作系统中。而 AGV 使用这种架构获得了独特的优势。”
TwinCAT 3 自动化软件仍然是 TwinCAT/BSD 应用的端到端开发和运行时平台。OMR 的工程师们很喜欢在 Visual Studio® 中使用各种语言进行编程,包括 IEC 61131-3 标准编程语言及其面向对象的语言扩展和功能块以及计算机科学标准语言。“我们的团队对 TwinCAT 非常满意,因为他们可以用它创建用户界面,例如生产线上的功能检查。这比在 Linux 中使用命令行要直观得多。”Jones 说道。“此外,还可以将它们与来自所有外围设备的数据连接起来,提高数据的可见性。”

EtherCAT 确保移动机器人行驶安全
EtherCAT 实时工业以太网通信系统拓扑结构灵活,支持与所有开放式协议通信。OMR 使用 EL6581 DMX 主站端子模块控制车辆上的安全灯,而 EL6751 CANopen 主站端子模块则简化了与第三方导航控制器的通信。这些模块在外观上与标准 I/O 卡一样,采用模块化设计,结构紧凑。
安全对于所有自主机器人来说都至关重要,TwinSAFE 技术基于 Fail Safe over EtherCAT(FSoE)国际开放标准确保高度安全性。FSoE 使用“黑色通道”方法,通过标准的 EtherCAT 网络进行安全数据通信。这样可以减少布线工作量,同时为数字量和模拟量安全提供必要的冗余。除了标准的安全逻辑之外,TwinCAT 还能够通过使用 Safety C 实现 TwinSAFE 应用,提高安全性。
UniMoverTM 使用了大量倍福 TwinSAFE 端子模块,尤其是 EL5001-0090 单通道 SSI 编码器接口端子模块,它简化了速度和位置监控。“在全向驱动方面,我们必须控制两个驱动电机和两个转向电机,因此我们需要知道转向角位置以及驱动电机本身的实际速度。”Jones 说道,“TwinSAFE 中的增强功能也让我们未来有更多选择,能够制造出更加复杂的移动机器人。”
紧凑型控制器助力移动机器人全速前进
Jones 认为,倍福技术的标准化使得 UniMoverTM O 600 的体积更小,操控性更强,因此更加耐用。结构紧凑的 C6017 比 OMR 之前使用的设备控制器占用的空间减少了 56%。C6017 和 EtherCAT 端子模块不仅节省空间,还能节约时间成本。过去,技术人员不得不将组件分散布置在设备周围。现在,他们可以提前制作标准的控制套件,并将它们安装在 UniMoverTM 的其中一个外壳内,减少了调试时间。
自动化新技术领导者的全球销售网络简化了与 OMR 团队的合作,Schuchart 解释说道:“UniMoverTM 项目就是一个很好的例子,充分说明了我们与客户之间的国际项目合作能力。我们直接与 OMR 在马里兰州和佛罗里达州的工程师、路易斯安那州的全球采购、荷兰的 Gareth 团队以及全球行业经理合作,确保所有小组成员之间的沟通顺畅。”
OMR 计划通过改用 EJ 系列 EtherCAT I/O 插拔式模块进一步提高生产效率,这一系列的模块安装在专用电路板上,使用的是标准连接器。EJ 模块比标准 I/O 模块体积小 50%,节省了传统离散接线所需的人工时间(大型移动机器人车队生产节省的时间更多),非常适合用于批量生产。这一解决方案让工程师可以直接使用成品 I/O,高效、便捷地创建自己的连接器板。
在 UniMoverTM O 600 项目取得成功之后,OMR 继续为新的车辆管理系统配备倍福的高性能、紧凑型自动化产品,比如 MaxMoverTM CB D 2000 自动平衡重式叉车。“MaxMoverTM 取代了传统叉车,但即使在满载情况下(有效载荷超过 4 吨),它也能像 UniMoverTM 一样在 AGV 或 AMR 模式下运行。”Jones 说道,“UniMoverTM 的设计非常具有挑战性。但我们希望凭借倍福为我们带来的技术优势,在更多的标准移动机器人生产线上应用相同的架构。”