
基于 PC 的控制技术助推车辆电动化改装
对于单件小批量生产企业和拥有大量相似车型的制造企业来说,快速、灵活和高性价比的综合检测试验台技术起着极其重要的作用。德国肯普滕应用技术大学就为 ABT e-Line 有限公司开发实施了这样一个试验台,它能够用于检测各种车型的性能,比如已完成电动转型的大众(VW)厢式车。倍福基于 PC 的控制技术的核心特征之一是使用标准工业组件。
肯普滕应用技术大学(HS Kempten)研发的试验台主要用于车辆功能测试。该试验台是在肯普滕应用技术大学专门研究汽车和自动化领域应用及开发课题的控制工程和车辆系统实验室中开发而成。实验室在 2016 年成立初期,主要测试单个零部件的可靠性,后来其活动范围逐渐扩大至复杂的完整系统试验台,甚至还包括教学活动。
试验台不仅可以测试新车辆和新功能,而且还能够检查各个功能之间如何相互影响。另一个优点是,车辆可以在其原有的适于行驶的状态下进行测试,而不用像大多数传统试验台那样必须进行改装。
来自肯普滕大学 Allgäu 研究中心的研究助理 Florian Zerbes 在介绍测试范围和过程时说道:“对于电动汽车,试验台主要测试通过高压电池包供电的暖通空调系统是否会对打开和关闭点火开关以及驾驶等车辆最重要的功能产生影响,测试内容包括规定测试周期,反复启动、停止车辆以及让车辆提速。车辆状态会因测试结果发生变化,即暖通空调系统打开或关闭,电池的充电水平也因此改变。通过肯普滕大学的试验台,该测试过程可以完全独立地运行几个小时甚至几天。这个过程包括连续采集试验台和车辆中的数据,以便对这些数据进行分析并转化为最终的测试结果。”
试验台结构
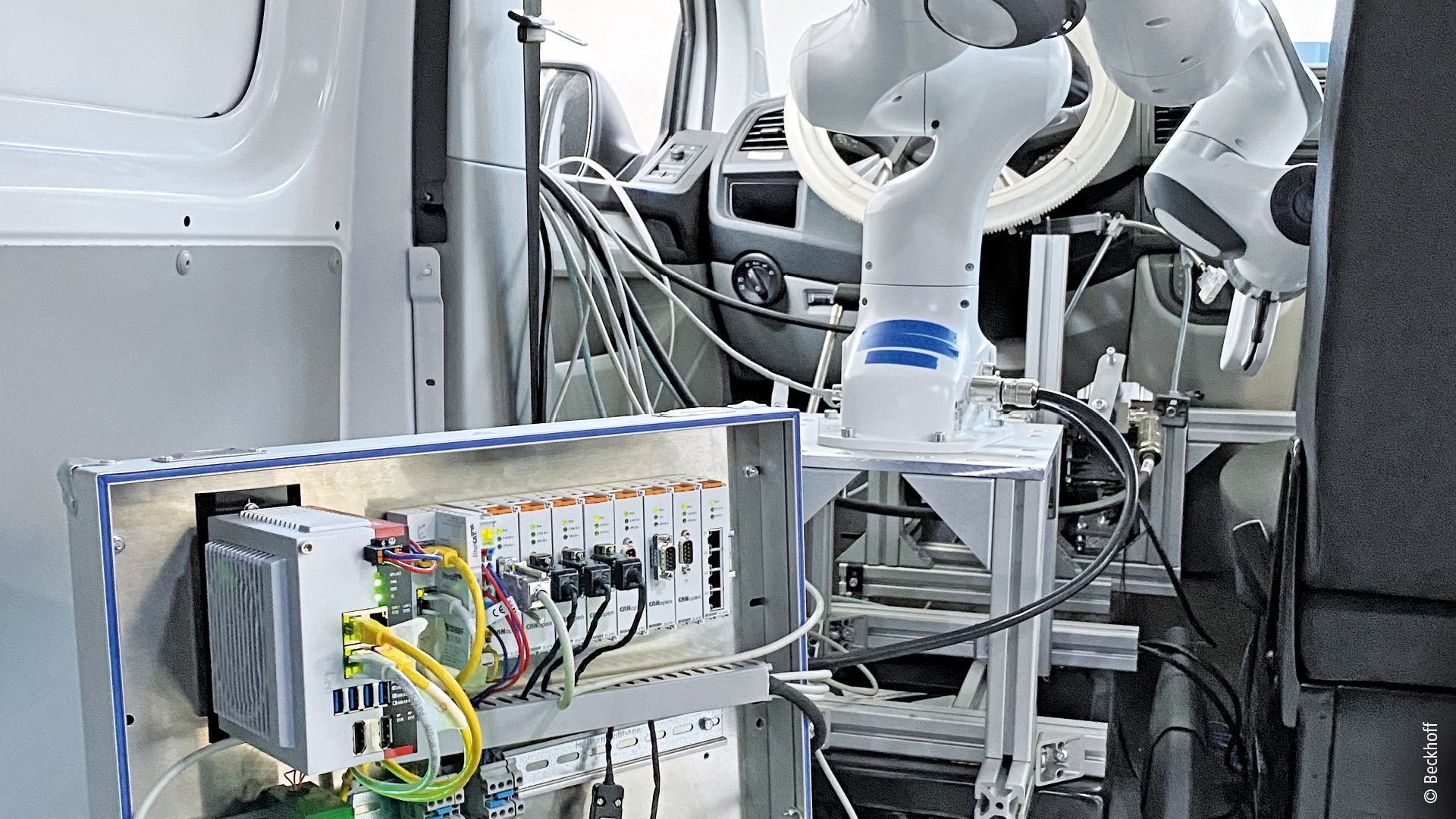
与车轮连接的电机输出轴提供车轮滚动阻力,模拟车辆在道路上行驶。车辆内的机器人转动点火钥匙,进行换挡操作,以及操控车内的各个按钮,例如车内气候控制系统的按钮。踏板上的直线电机按下油门和刹车踏板,而转向电机则驱动方向盘转向。车外的第二个机器人将各种充电线插入充电插座和从充电插座拔出。

测量模块用于采集车内线束的电流和电压,以便进行后续分析。安装有 TwinCAT 的倍福 C6030 超紧凑型工业 PC 作为控制平台,负责实现与各组件和车辆(通过 CAN 总线)之间的通信。中央控制单元用于协调控制各个组件,可以使用不同的程序进行各种不同的测试。9 个能够集成任何 CAN 和 CANopen 设备的 EL6751 EtherCAT 单通道通信接口端子模块确保将 CAN 设备无缝集成到 EtherCAT 控制系统中。
在试验期间,车辆会在真实的路面驾驶条件下进行模拟。驾驶试验台会根据仿真转矩转动车轮,甚至可以模拟车轮转向运动。这种仿真试验真实度极高,可以使用相应的执行机构仿真驾驶员的动作。大部分动作由工业机器人执行,以完成尽可能多的不同动作。试验台还可以模拟现实环境,以及车辆如何与周围环境进行通信(例如通过 GPS 系统)。肯普滕应用技术大学除了成功开发试验台之外,还为系统打造了一个数字孪生平台。这不仅有利于实现试验台的预试车,而且还能够实现全面的系统可视化和监测。
工业技术助力降低成本、提升灵活性
肯普滕应用技术大学在开发新的试验台时,主要考虑如何让系统尽可能地具有成本效益。只有使用逆变器、电机和控制器等标准工业组件才能实现这一需求。另一个考虑因素是确保系统能够快速安装和拆卸,而且基本上不受车辆影响。因此,试验台必须能够方便地根据具体的应用需求进行调整。

肯普滕应用技术大学的机械工程教授 Andreas Stiegelmeyr 博士在描述系统要求及具体实施情况时说道:“我们开发了一款能够使用标准车辆接口测试大部分车辆功能的试验台,无论是什么车型,都能够通过快速连接、以最小的投入测试车辆的各个功能。我们为此打造了一个很好的替代方案,适用于车型众多的汽车制造商,尤其是小批量汽车制造商。”
Florian Zerbes 补充说道:“由于倍福控制产品配备很多不同的工业组件接口,因此我们从中选用了几款产品,构成中央控制系统。更重要的是,通过添加 EtherCAT 端子模块可以轻松扩展控制系统,再加上 EtherCAT 拓扑结构非常灵活,因此可以根据整个空间情况进行优化布署。同时倍福可以提供大量软硬件产品,这也意味着可以用最小的投入完成大量测量和控制任务。最重要的是,倍福基于 PC 的控制技术相对于汽车领域使用的很多系统,具有明显的成本优势。”
用于确定测试序列的工具链
测试序列使用专门开发的工具链在结构化文本(ST)中编写,并通过 MATLAB®/Simulink® 生成。这样可以将 TwinCAT 和 Simulink® 有效地结合使用。Florian Zerbes 说道:“通过 Simulink® 可以自动生成包含硬件连接信息的功能块。在编译各自模型时,可以通过 TwinCAT Automation Interface 自动设置相应的硬件连接,并在模型和硬件之间创建一个链路层。”新的工具链提供以下功能:
- 毫不费力地创建所需的 Simulink® 模型
- 轻松使用不同的数据库
- 自动连接硬件,并直接在 Simulink® 模型中配置
- 为用户提供简洁明了的界面
工具链目前的重点是 CAN 总线,这意味着,例如,可以通过 DBC 文件快速创建 CAN 信息块。然后,像这样的功能块可以直接连接模型的其它部分,并且可以在 Simulink® 中配置硬件接口。用户可以通过 GUI 配置各个信息,并在 Simulink® 中直接配置硬件的其它接口。一旦 Simulink® 模型创建完毕,就可以通过工具链轻松连接 TwinCAT。用户需要做的只是决定哪个 Simulink® 模型与哪个 TwinCAT 项目相连。所有一切全部都可以自动完成,同时,还可以调整 TwinCAT 项目使用的硬件或 PLC 项目的实施等。