基于 PC 的控制技术构成高校科研演示箱的核心
海尔布隆应用技术大学开发的 IDEA 演示箱(工业数字化在自动化教学中的应用)旨在以简单实用的方式向学生介绍工业 4.0 这一主题。演示箱的核心是倍福基于 PC 的控制系统,它由 C6015 超紧凑型工业 PC、TwinCAT 和 EtherCAT 端子模块灵活组合而成的 I/O 系统构成。
据项目发起人 Thomas Pospiech 教授介绍,这个“装满未来科技的魔法手提箱”将让海尔布隆应用技术大学(HHN)技术学院的学生受益匪浅。有了它,就可以在课堂上直接实施和解决信息技术与自动化日益融合的众多工业应用案例。
IDEA 演示箱背后的理念
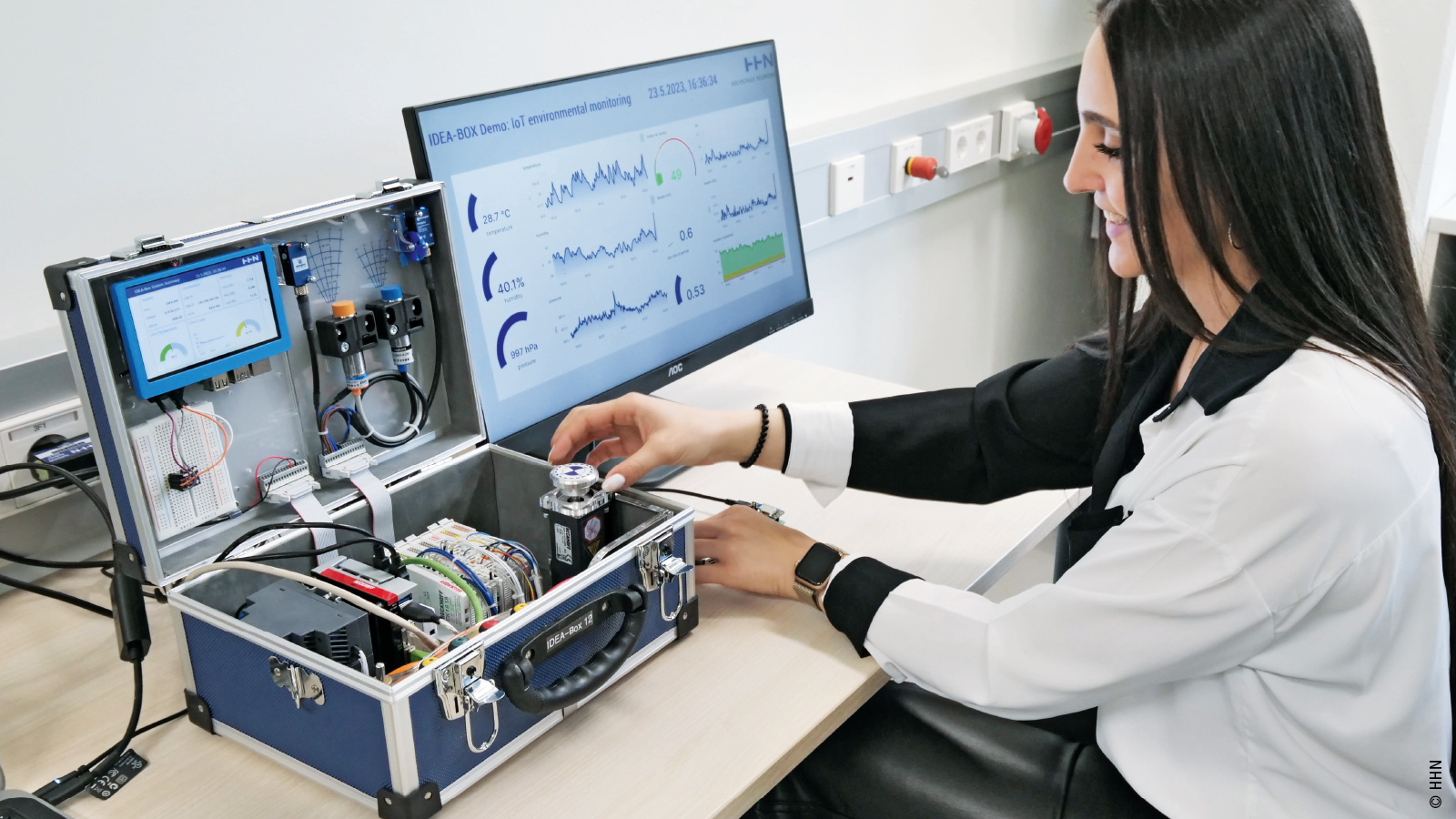
学生们用传感器构建自己的电路,并对 IDEA 演示箱进行编程,以便让它能够读取和处理传感器信号。结果可能是以图形方式显示测量变量值随时间的变化情况,当超过或未达到极限值时,讲堂中的所有 IDEA 演示箱都会触发警报;或者激活演示箱中的电机。数据通过互联网传输到学生的智能手机上。IDEA 演示箱用途广泛,特别适合让学生实现自己的想法。
总体而言,演示案例涵盖了传统自动化技术的所有基础知识,例如通过电容式和电感式接近开关进行数据采集和处理,以及简单的单轴定位任务。Thomas Pospiech 教授补充道:“它也可以让学生在处理对时间要求严格如控制周期时间范围内的应用中获得经验。”
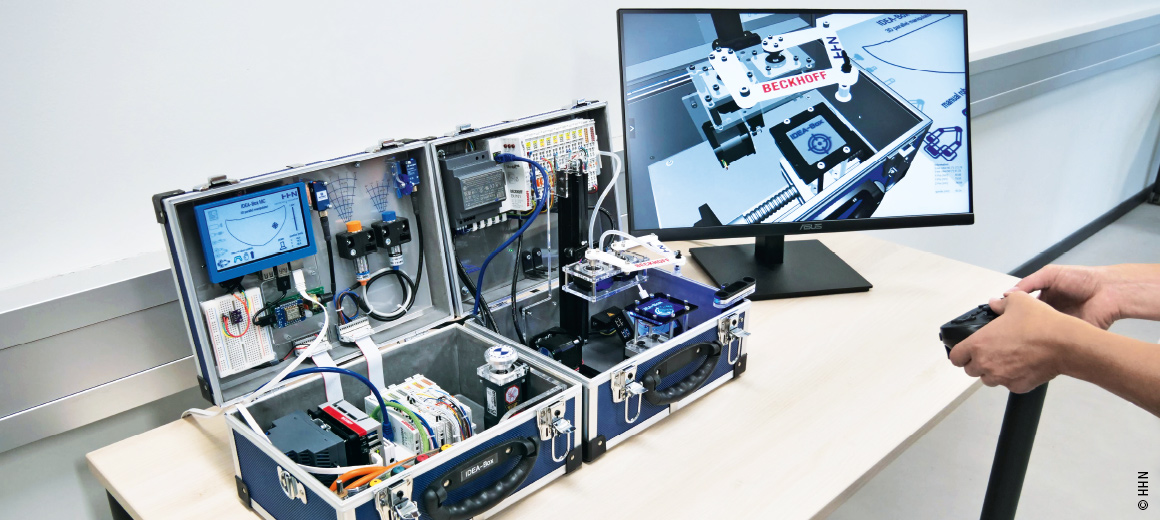
IDEA 演示箱是一个体积约为 9 升的小箱子,内含一台 C6015 超紧凑型工业 PC、一个 EK1818 EtherCAT 耦合器、多个 EtherCAT 端子模块(如 EL3174、EL7047 和 EL7211)、树莓派单板计算机以及传感器和执行机构。这样,除了同步伺服电机之外,学生还可以操控直流电机和步进电机。演示箱配备的各种接口和插槽还可以连接和联网用户自己开发的产品,例如连接微控制器。这样不仅可以帮助学生更好地理解信息物理系统的概念,还可以让学生通过实际操作掌握应用经验。
基于 PC 的控制技术助力实现系统开放性
可扩展性也有助于实现高度灵活性,例如,用新开发的模块取代箱盖上的两个现有模块(传感器和微控制器)。这样就可以集成新的学习内容,例如加入图像处理模块,而无需完全重建 IDEA 演示箱。为了向学生传达尽可能多的技术要求,演示箱所使用的通信技术与结构同样灵活。例如,C6015 通过 EtherCAT 与 I/O 端子模块通信,并通过 MQTT 与云解决方案通信。此外,它还支持 ADS、OPC UA、Modbus、WLAN 和 I2C 数据总线。
Thomas Pospiech 教授认为,这种系统的开放性对于尽可能广泛地向学生传授知识来说至关重要:“我特别欣赏倍福基于 PC 的控制技术对所有软件和技术的开放性,而所有这些软件和技术都可能会出现在我们的教学中并需要给学生讲授。工业 PC 是实现这一目标的理想选择,因为只有工业 PC 才能以如此高的包装密度实现这样的功能。另一个主要优势是 TwinCAT 还可以轻松、全面地集成 MATLAB®/Simulink® 等软件包。”
Thomas Pospiech 教授表示,IDEA 演示箱在 2020 年新学期伊始首次投入使用,而这种结构极其紧凑的演示箱在当时环境下发挥出的强大优势令人意想不到:“随着新冠肺炎疫情的爆发,我们很快就改为线上授课,其巨大优势在于,学生只需将 IDEA 演示箱带回家,就能像在学校里一样进行实际操作。”
多轴运动和机器人技术扩展箱
“运动控制”扩展箱的开发旨在实现多轴运动和机器人运动学的通信教学。箱盖上装有所需的电源以及 EtherCAT 耦合器和端子模块。此外,箱内还有一个步进电机、一个双轴运动系统和两个不同的直线轴,其中一个带有钟摆机构。C6015 给连接 的IDEA 基本箱提供智能控制。Thomas Pospiech 教授解释道:“例如,使用带主轴的步进电机,可以将纯数学编程与机械特性非常高效地结合起来,从而让学生能够全面了解整个机电一体化系统的电机、旋转运动、主轴或主轴间距、进给或基准运行等各个方面。这时,TwinCAT 的优势就显现出来了,因为各种电机(无论是步进电机还是伺服电机)在软件应用程序中的处理方式完全相同。因此,老师可以使用其中一种电机向学生传授所需的知识,然后他们可以轻松地将所学知识迁移到另一种电机上,以巩固所学知识。”
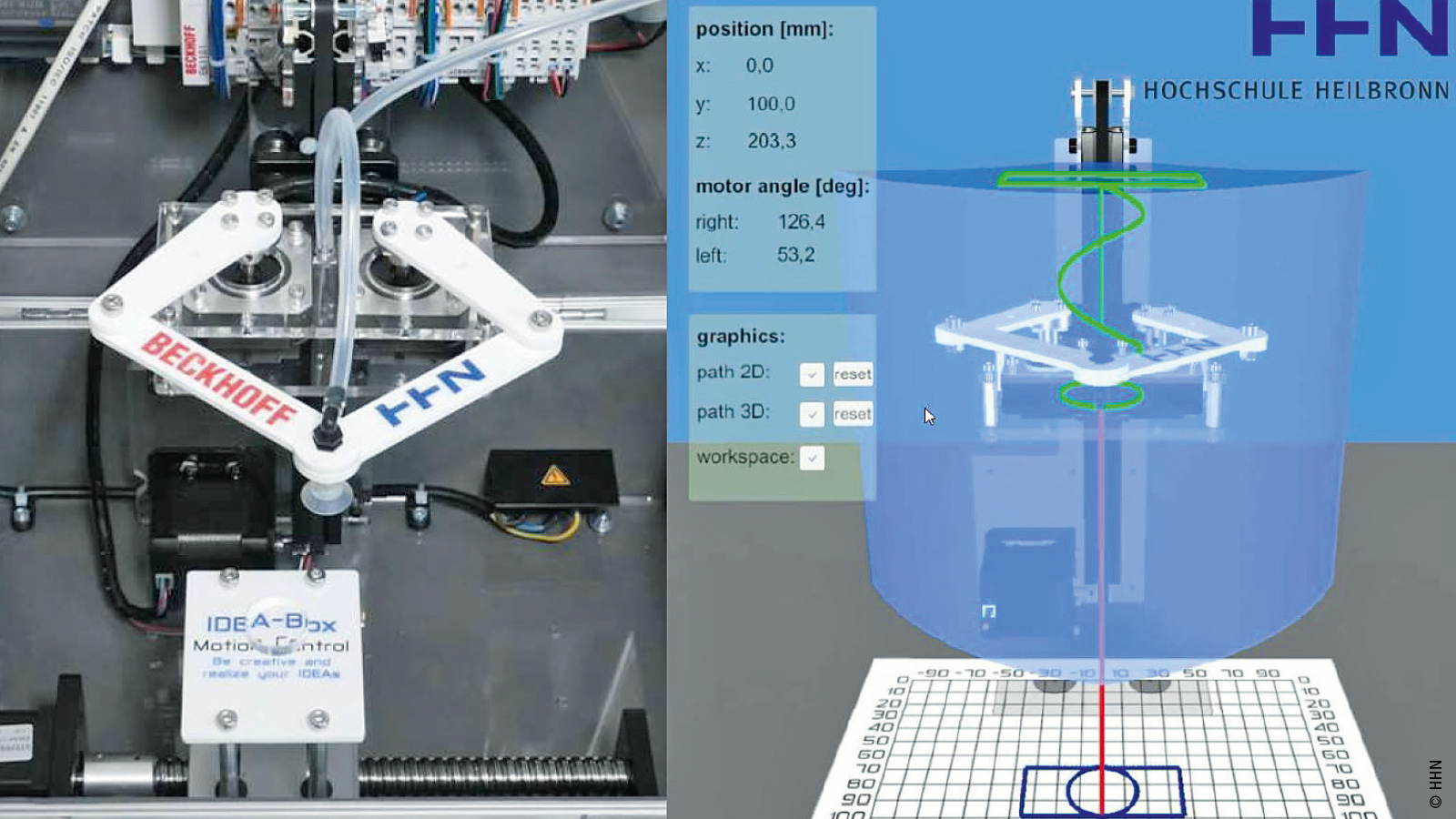
诸如凸轮板、抗振算法和无共振定位等更复杂的功能,也可以通过运动控制扩展箱和带钟摆机构的直线轴实现。这得益于模块化设计在这里得到了延续,也就是说,轴的更换非常简单,例如,可以用作为理解基于球平衡的控制工程模型的一种方法。双臂 SCARA 机器人运动学主要是针对手动参照和正反转换课题教学。通过将多个轴组合起来,甚至可以增加复杂性,例如,通过简单的转换,将机器人运动学和主轴组合成一个拾放装置。
通过模型集成创建数字孪生
运动控制扩展箱的 CAD 模型可与 PLC 程序运动同步,让学生能够获得数字孪生的初步体验。Thomas Pospiech 认为,这对未来的技术发展尤为重要:“通过机床数字孪生的虚拟调试,开发步骤可以提前,后续加工步骤可以并行处理,这是德国作为世界制造业强国保持其竞争力的先决条件。而这正是我们的学生应该接受的最好的培训。”
Thomas Pospiech 博士教授认为,TwinCAT 再次彰显了其开放性带来的显著优势:“例如,钟摆的摆动不是通过传感器系统记录的,而是通过直接集成在 TwinCAT 中的相应 MATLAB®/Simulink® 模型进行仿真。C6015 超紧凑型工业 PC 上总共运行了五个这样的物理行为模型,包括用于齿形皮带等柔性组件的模型。数字孪生与控制器之间通过 TwinCAT ADS 进行双向通信。”通过底层 Unity 模型中集成的虚拟传感器可以测定运动部件或组件的所有几何距离。例如,可以通过这种方式进行碰撞检测并动态监测机器人工作空间。这些信息可以在 Unity 模型中生成,并反馈给 PLC。控制器会依次处理这些信息,并执行相应的功能以采取适当的措施。
IDEA 演示箱是针对学科教学而开发的。但近年来,该系统显然也引起了工业界的极大兴趣,因为通过该系统,工业界可以为各个应用领域尽快找到合适的解决方案。此外,海尔布隆应用技术大学还免费提供授课过程中创建的所有程序,以便尽可能广地推广该演示箱,激励更多年轻人投身于科技创新的事业中。学校还将推出更多的扩展箱来实现这一目标,包括通过增强现实技术控制六轴运动系统。
更多信息




